代码 github FaceDetectionComparison
在本教程中,我们将讨论OpenCV和Dlib中的各种人脸检测方法,并对这些方法进行定量比较。我们将在c++中共享以下人脸检测的代码:
- OpenCV中的Haar级联人脸检测器
- OpenCV中基于深度学习的人脸检测
- Dlib中的HoG Face检测器
- Dlib中基于深度学习的人脸检测
我们不讨论它们的理论,只讨论它们的用法。我们还将根据您的应用程序分享一些关于选择哪种模型的经验法则。
在整个文章中,我们将假设图像大小为300×300。
一、OpenCV中的Haar级联人脸检测器
基于Haar级联的人脸检测技术是自2001年Viola和Jones提出人脸检测技术以来最先进的人脸检测技术。近年来有了许多改进。OpenCV有许多基于Haar的模型,可以在这里找到。
代码
faceCascadePath = "./haarcascade_frontalface_default.xml";
faceCascade.load( faceCascadePath )
std::vector<Rect> faces;
faceCascade.detectMultiScale(frameGray, faces);
for ( size_t i = 0; i < faces.size(); i++ )
{
int x1 = faces[i].x;
int y1 = faces[i].y;
int x2 = faces[i].x + faces[i].width;
int y2 = faces[i].y + faces[i].height;
}
上面的代码片段加载haar级联模型文件并将其应用于灰度图像。输出是一个包含检测到的面孔的列表。列表中的每个成员都是一个包含4个元素的列表,这些元素表示左上角的(x, y)坐标和检测到的面的宽度和高度。
优点
- 在CPU上几乎实时工作
- 架构简单
- 识别不同尺度的脸
缺点
- 它给出了很多错误的预测。
- 对非正面图像不起作用。
- 在遮挡下不起作用
二、OpenCV中的DNN人脸检测器
这个模型包含在OpenCV3.3以上中。它以单点多盒探测器为基础,以ResNet-10架构为骨干。该模型是使用从网上获得的图像进行训练的,但其来源没有透露。OpenCV为这种人脸检测器提供了两种模型。
- 原始caffe实现的浮点16位版本(5.4 MB)
- 使用Tensorflow的8位量化版本(2.7 MB)
代码
const std::string caffeConfigFile = "./deploy.prototxt";
const std::string caffeWeightFile = "./res10_300x300_ssd_iter_140000_fp16.caffemodel";
const std::string tensorflowConfigFile = "./opencv_face_detector.pbtxt";
const std::string tensorflowWeightFile = "./opencv_face_detector_uint8.pb";
#ifdef CAFFE
Net net = cv::dnn::readNetFromCaffe(caffeConfigFile, caffeWeightFile);
#else
Net net = cv::dnn::readNetFromTensorflow(tensorflowWeightFile, tensorflowConfigFile);
#endif
我们使用上面的代码加载所需的模型。如果我们想要使用Caffe的浮点模型,我们可以使用caffemodel和prototxt文件。否则,我们使用TensorFlow模型。还请注意我们阅读Caffe和Tensorflow网络的方式的不同。
#ifdef CAFFE
cv::Mat inputBlob = cv::dnn::blobFromImage(frameOpenCVDNN, inScaleFactor, cv::Size(inWidth, inHeight), meanVal, false, false);
#else
cv::Mat inputBlob = cv::dnn::blobFromImage(frameOpenCVDNN, inScaleFactor, cv::Size(inWidth, inHeight), meanVal, true, false);
#endif
net.setInput(inputBlob, "data");
cv::Mat detection = net.forward("detection_out");
cv::Mat detectionMat(detection.size[2], detection.size[3], CV_32F, detection.ptr<float>());
for(int i = 0; i < detectionMat.rows; i++)
{
float confidence = detectionMat.at<float>(i, 2);
if(confidence > confidenceThreshold)
{
int x1 = static_cast<int>(detectionMat.at<float>(i, 3) * frameWidth);
int y1 = static_cast<int>(detectionMat.at<float>(i, 4) * frameHeight);
int x2 = static_cast<int>(detectionMat.at<float>(i, 5) * frameWidth);
int y2 = static_cast<int>(detectionMat.at<float>(i, 6) * frameHeight);
cv::rectangle(frameOpenCVDNN, cv::Point(x1, y1), cv::Point(x2, y2), cv::Scalar(0, 255, 0),2, 4);
}
}
在上面的代码中,图像被转换成一个blob并使用forward()函数通过网络传递。输出检测为4-D矩阵,其中
- 第三维迭代检测到的面部。(i是面部数的迭代器)
- 第四个维度包含关于边界框和每个面部得分的信息。例如,detections[0,0,0,2]给出第一个面部的置信度,detections[0,0,0,3:6]给出边界框。
边界框的输出坐标在[0,1]之间归一化。因此,坐标应该乘以原始图像的高度和宽度,以得到图像上正确的边界框。
优点
- 四种方法中最精确的
- 在CPU上实时运行
- 适用于不同的面部朝向-向上,向下,左,右,侧面等。
- 即使在遮挡的情况下也能工作
- 检测不同尺度的脸(检测大脸和小脸)
基于DNN的探测器克服了Haar级联探测器的所有缺点,同时又不损害Haar提供的任何优点。我们看不到这个方法的主要缺点,除了它比下面讨论的基于Dlib HoG的人脸检测器慢。
三、Dlib中的HoG Face检测器
这是一种应用广泛的基于HoG特征和SVM的人脸检测模型。你可以在这篇文章中读到更多关于HoG的信息。该模型由5个HOG过滤器组成——前视、左视、右视、前视但向左旋转,以及前视但向右旋转。模型嵌入在头文件本身中。
代码
frontal_face_detector hogFaceDetector = get_frontal_face_detector();
// Convert OpenCV image format to Dlib's image format
cv_image<bgr_pixel> dlibIm(frameDlibHogSmall);
// Detect faces in the image
std::vector<dlib::rectangle> faceRects = hogFaceDetector(dlibIm);
for ( size_t i = 0; i < faceRects.size(); i++ )
{
int x1 = faceRects[i].left();
int y1 = faceRects[i].top();
int x2 = faceRects[i].right();
int y2 = faceRects[i].bottom();
cv::rectangle(frameDlibHog, Point(x1, y1), Point(x2, y2), Scalar(0,255,0), (int)(frameHeight/150.0), 4);
}
在上面的代码中,我们首先加载面部检测器。然后我们将图像通过检测器。第二个参数是我们想upscale图像的次数。upscale越大,越有可能发现较小的脸。然而,图像的upscale将对计算速度产生实质性的影响。输出的形式是带有对角角(x, y)坐标的面部列表。
优点
- CPU上最快的方法
- 非常适合正面和稍微不正面的脸
- 重量轻的模型相比,其他三个
- 在轻微遮挡下工作
基本上,除了下面讨论的几种情况外,这种方法在大多数情况下都是有效的。
缺点
- 主要缺点是它不能检测小的脸,因为它是训练最小的脸尺寸为80×80。因此,您需要确保在您的应用程序中,面部大小应该大于这个值。然而,你可以训练你自己的脸探测器来检测较小的脸
- 边界框通常会排除部分额头,有时甚至会排除部分下巴
- 在大量遮挡的情况下效果不是很好
- 不适合侧脸和极端非正面脸,如向下或向上看
四、Dlib中的CNN人脸检测器
该方法使用基于CNN的最大边缘对象检测器(MMOD)。此方法的训练过程非常简单,您不需要大量数据来训练自定义对象检测器。更多信息,请访问网站。
代码
String mmodModelPath = "./mmod_human_face_detector.dat";
net_type mmodFaceDetector;
deserialize(mmodModelPath) >> mmodFaceDetector;
// Convert OpenCV image format to Dlib's image format
cv_image<bgr_pixel> dlibIm(frameDlibMmodSmall);
matrix<rgb_pixel> dlibMatrix;
assign_image(dlibMatrix, dlibIm);
// Detect faces in the image
std::vector<dlib::mmod_rect> faceRects = mmodFaceDetector(dlibMatrix);
for ( size_t i = 0; i < faceRects.size(); i++ )
{
int x1 = faceRects[i].rect.left();
int y1 = faceRects[i].rect.top();
int x2 = faceRects[i].rect.right();
int y2 = faceRects[i].rect.bottom();
cv::rectangle(frameDlibMmod, Point(x1, y1), Point(x2, y2), Scalar(0,255,0), (int)(frameHeight/150.0), 4);
}
代码类似于HoG检测器,除了在本例中,我们加载的是cnn人脸检测模型。同样,坐标也存在于一个rect对象中。
优点
- 适用于不同的面部朝向
- 遮挡下工作
- 在GPU上工作非常快
- 非常简单的训练过程
缺点
- CPU上速度很慢
- 不检测小的脸,因为它是训练的最小脸尺寸为80×80。因此,您需要确保在您的应用程序中,面部大小应该大于这个值。然而,你可以训练你自己的脸探测器来检测较小的脸。
- bounding box甚至比HoG检测器还要小。
五、准确度对比
我尝试使用FDDB数据集,使用用于评估OpenCV-DNN模型的脚本来评估这4个模型。然而,我发现了令人惊讶的结果。Dlib的结果比Haar差,尽管Dlib的输出在视觉上看起来要好得多。以下是4种方法的精度得分。
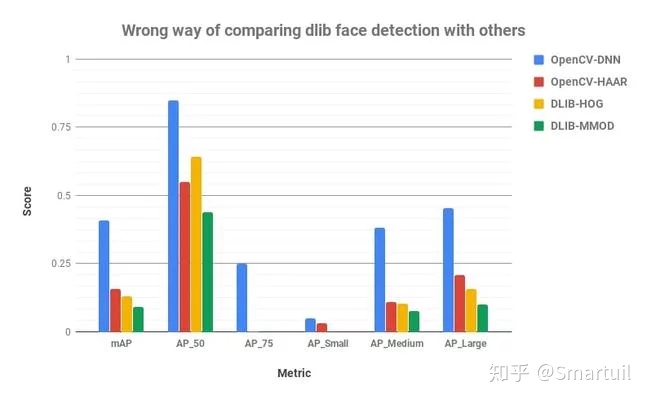
AP_50 = Precision when overlap between Ground Truth and predicted bounding box is at least 50% ( IoU = 50% )
AP_75 = Precision when overlap between Ground Truth and predicted bounding box is at least 75% ( IoU = 75% )
AP_Small = Average Precision for small size faces ( Average of IoU = 50% to 95% )
AP_medium = Average Precision for medium size faces ( Average of IoU = 50% to 95% )
AP_Large = Average Precision for large size faces ( Average of IoU = 50% to 95% )
mAP = Average precision across different IoU ( Average of IoU = 50% to 95% )
仔细观察后,我发现这个评价对Dlib是不公平的。
1.以错误的方式评估准确性!
根据我的分析,dlib数值偏低的原因如下:
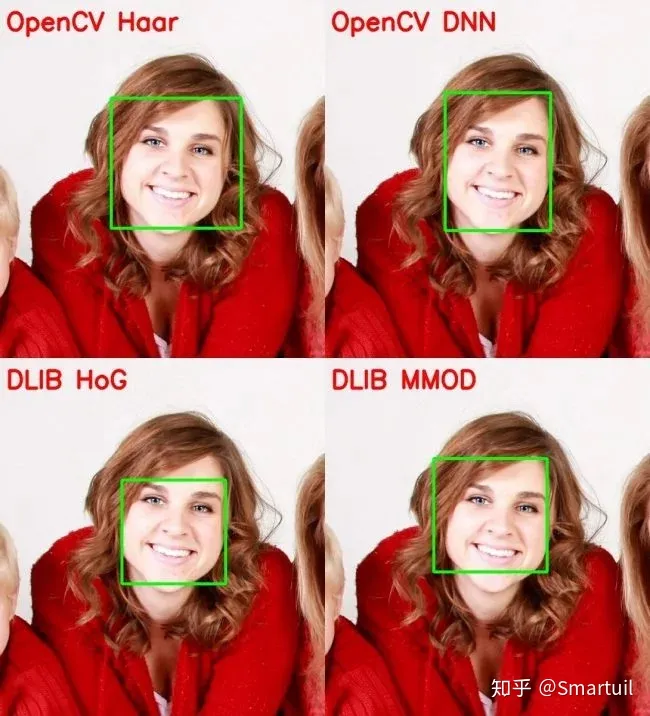
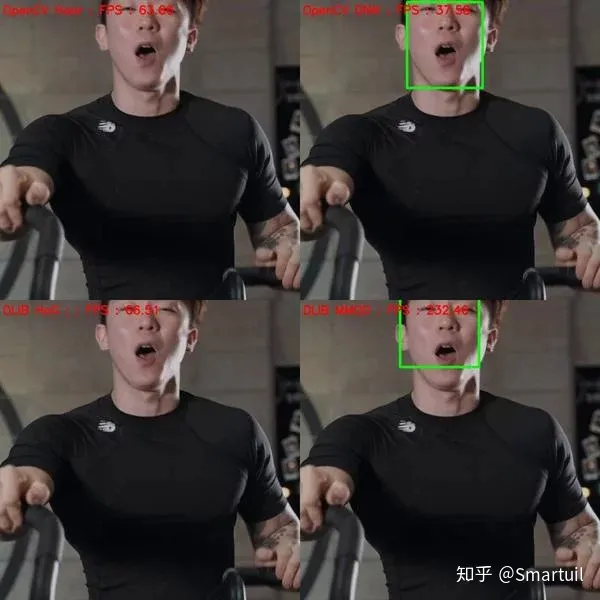
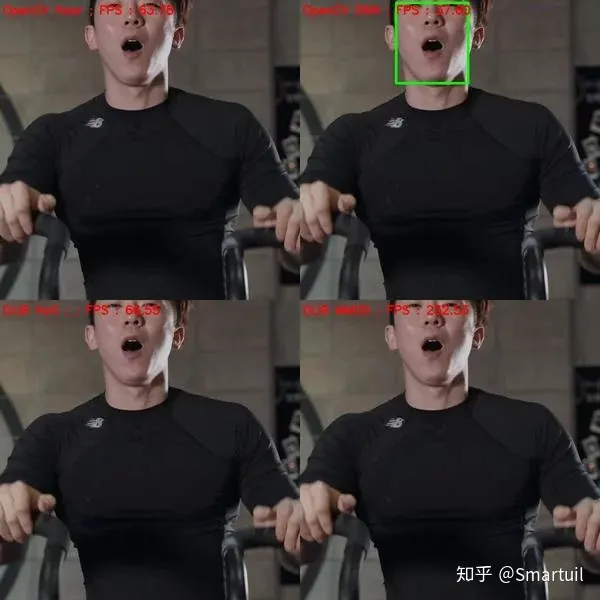
主要原因是dlib是使用标准数据集训练的,但是没有它们的注释。这些图像是由作者注释的。因此,我发现即使检测到人脸,边界框也与Haar或OpenCV-DNN有很大的不同。他们更小,经常修剪前额和下巴的部分如下图所示。
这可以从上面图中的AP_50和AP_75分数得到进一步的解释。AP_X表示在ground truth和检测到的box之间有X%的重叠时的精度。dlib模型的AP_75得分为0,但AP_50得分高于Haar。这仅仅意味着Dlib模型能够检测到比Haar模型更多的面,但是Dlib的较小的边界框降低了它们的AP_75和其他数字。
第二个原因是dlib无法检测到小脸,这进一步降低了数字。
因此,OpenCV和Dlib之间公平比较的惟一相关度量是AP_50(甚至小于50,因为我们主要是比较检测到的面孔的数量)。所以,在使用Dlib人脸检测器时,应该始终记住这一点。
六、速度对比
我们用一张300×300的图像来比较这两种方法。MMOD探测器可以在GPU上运行,但是在OpenCV中对NVIDIA GPU的支持仍然不存在。因此,我们评估的方法只对CPU,并报告结果的MMOD对GPU以及CPU。
硬件
处理器:英特尔酷睿i7 6850K
RAM: 32 GB
GPU: NVIDIA GTX 1080 Ti, 11 GB内存
操作系统:Linux 16.04 LTS
编程语言:Python
我们在给定的图像上运行每个方法10000次,然后进行10次这样的迭代,并平均所花费的时间。以下是结果。
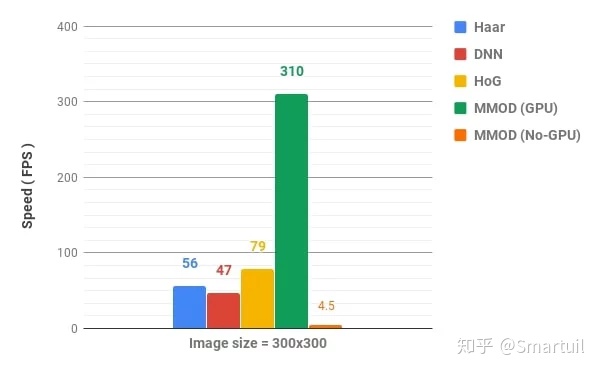
可以看到,对于这个大小的图像,除了MMOD之外,所有方法都是实时执行的。MMOD检测器在GPU上非常快,但在CPU上非常慢。
还应该注意,这些数字在不同的系统上可能是不同的。
七、不同条件下的比较
除了准确性和速度之外,还有其他一些因素帮助我们决定使用哪一个。在本节中,我们将根据其他各种重要的因素来比较这些方法。
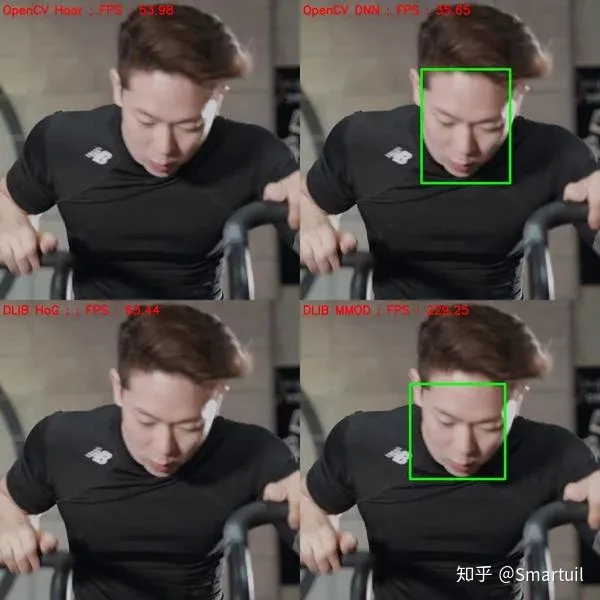
1.检测规模
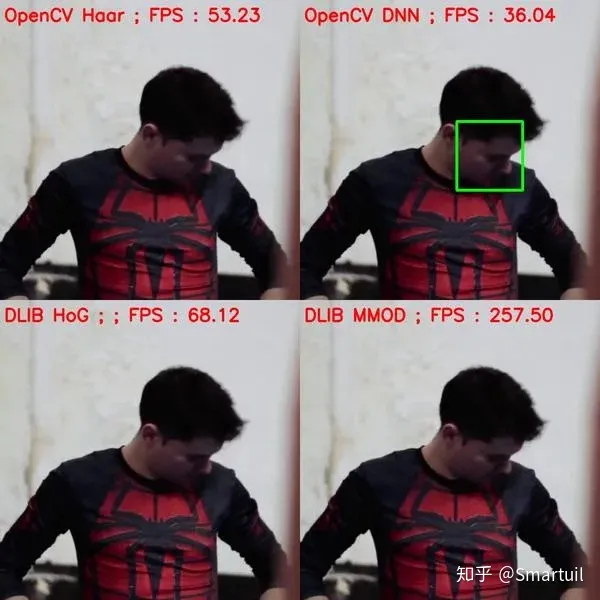
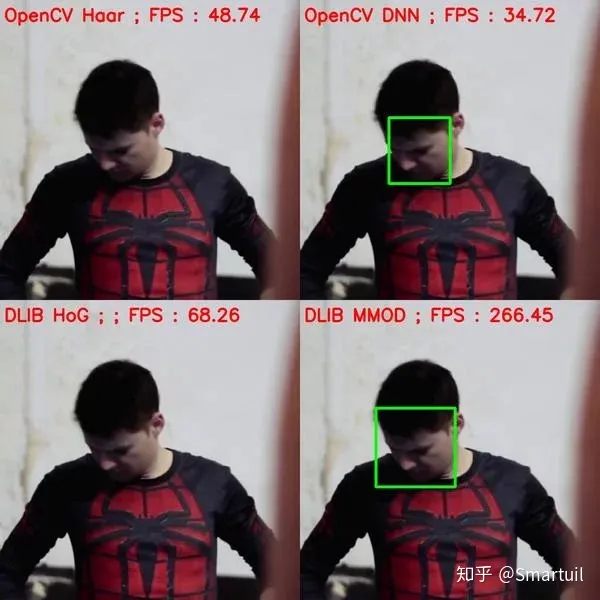
我们将会看到一个例子,在同一个视频中,一个人来回n次,使得脸变得又小又大。我们注意到OpenCV DNN检测所有的面,而Dlib只检测那些较大的面。我们还显示了检测到的面和边界框的大小。
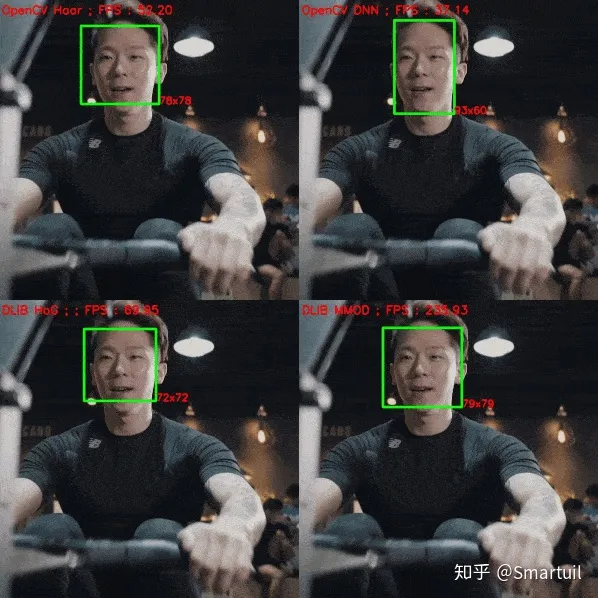

可以看出,基于dlib的方法能够检测到尺寸为~(70×70)的人脸,之后无法检测到。如前所述,我认为这是基于Dlib方法的主要缺点。因为在大多数情况下不可能事先知道脸的大小。我们可以通过升级图像来解决这个问题,但是dlib相对于OpenCV-DNN的速度优势就消失了。
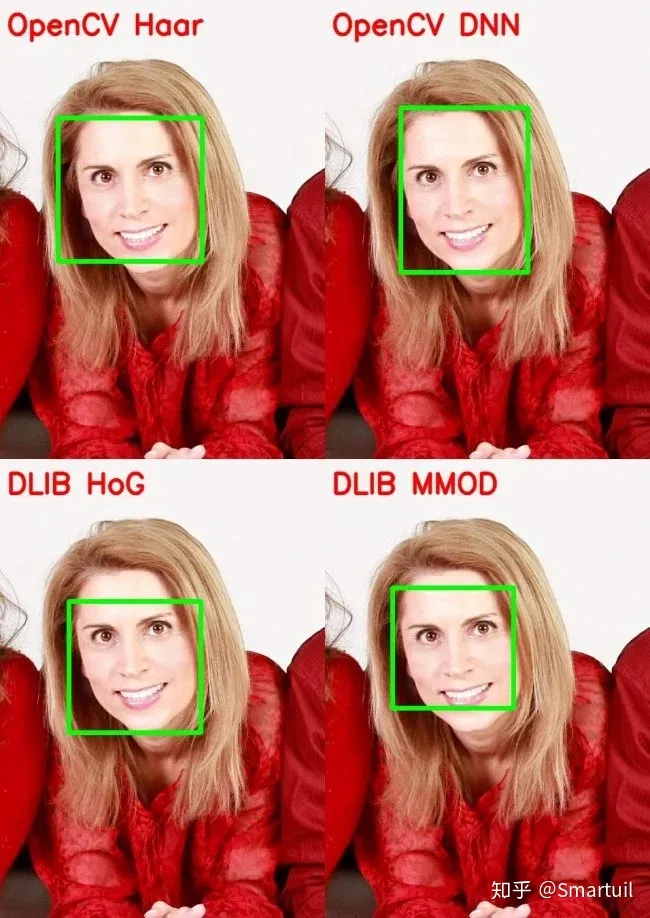
2.非正脸
非正面的人可以朝右、左、上、下看。同样,为了公平对待dlib,我们要确保面尺寸大于80×80。下面是一些例子。
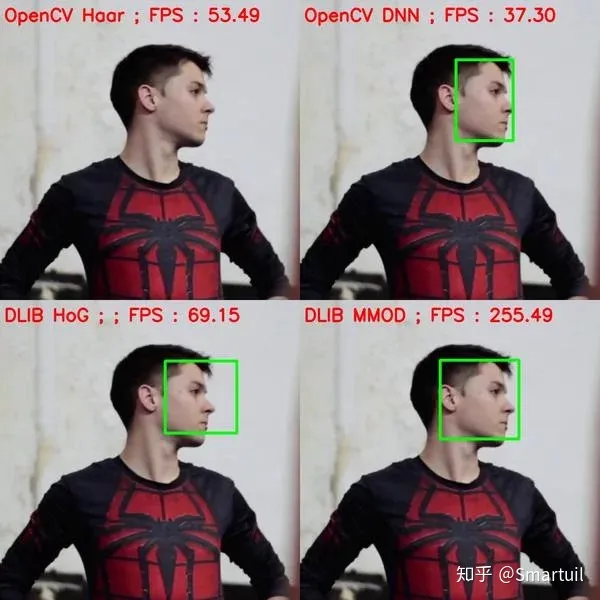
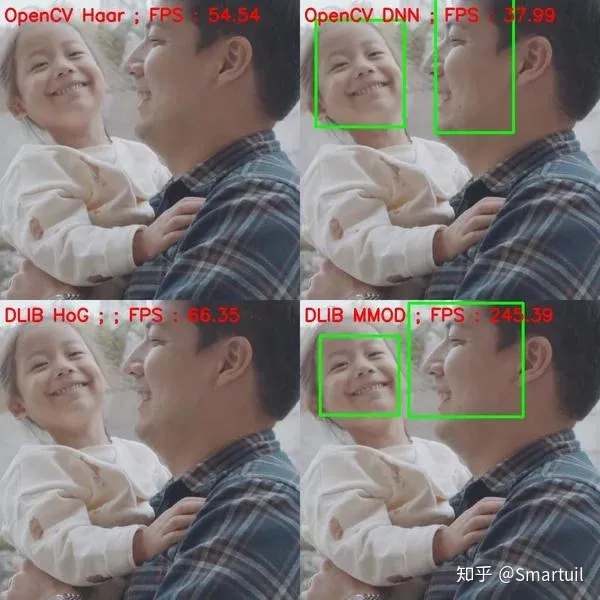
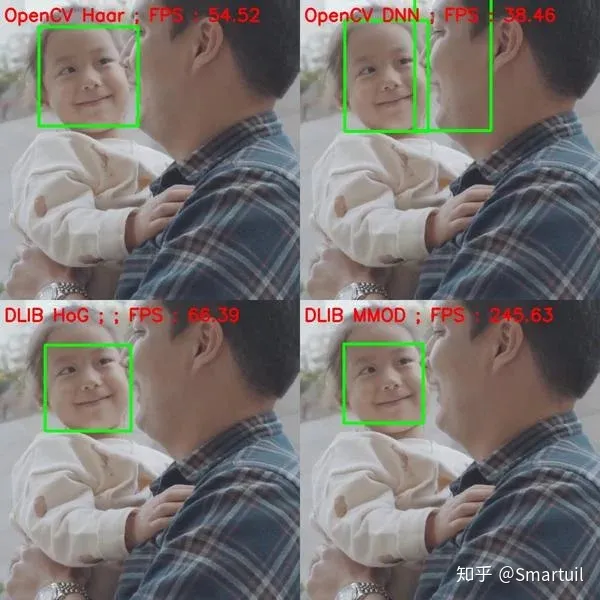
与预期一样,基于Haar的检测器完全失效。HoG检测器确实可以检测出左脸或右脸的人脸(因为它是针对这些人脸进行训练的),但其准确性不如基于DNN的OpenCV和Dlib检测器。
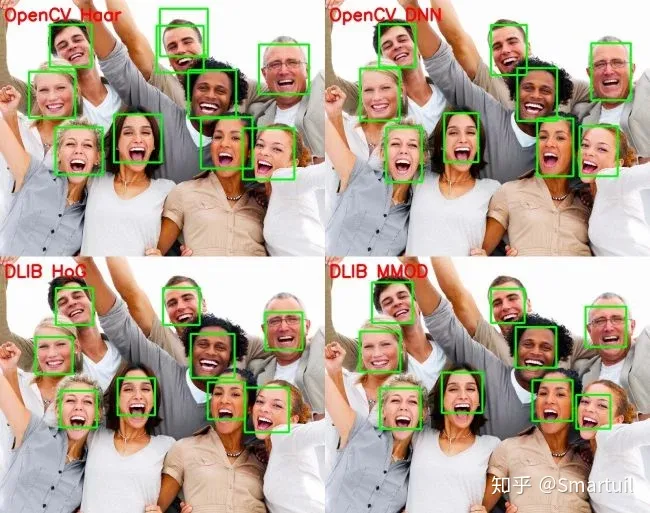
3.遮挡
让我们看看这些方法在遮挡下的表现如何。

同样,DNN方法优于其他两种方法,OpenCV-DNN稍微优于Dlib-MMOD。这主要是因为CNN的特征比HoG或Haar的特征要健壮得多。
八、结论
我们在各自的小节中讨论了每种方法的优缺点。我建议对您的应用程序同时尝试OpenCV-DNN和HoG方法,并据此做出决定。我们分享一些开始的技巧。
一般情况
在大多数应用程序中,我们事先不知道图像中人脸的大小。因此,最好使用OpenCV - DNN方法,因为它是非常快速和非常准确的,即使是小尺寸的脸。它还能探测不同角度的人脸。我们建议在大多数情况下使用OpenCV-DNN
对于中、大型图像尺寸
Dlib HoG是CPU上最快的方法。但它不能检测到小脸(< 70x70)。因此,如果您知道您的应用程序将不会处理非常小的面孔(例如自拍照应用程序),那么基于HoG的面孔检测器是一个更好的选择。此外,如果你可以使用GPU,那么MMOD人脸检测是最好的选择,因为它在GPU上非常快,还提供各种角度的检测。
高分辨率照片
由于向这些算法(为了提高计算速度)提供高分辨率图像是不可能的,所以当您缩小图像时,HoG / MMOD检测器可能会失败。另一方面,OpenCV-DNN方法可以用于这些,因为它可以检测小的面孔。
参考